长上下文外推
LLaMA 2 训练时只见过 4096 个 token 长度的文本。但今天的模型能处理 128K 甚至 1M——同样的架构,训练时从没见过的长度,推理时居然能用。
答案在位置编码的外推技术里。这一节从 Attention 的长度瓶颈出发,逐步理解 RoPE 为什么能外推、PI 做了什么、NTK 和 YaRN 又改进了什么,最后学会测试长上下文能力。
长上下文外推(Length Extrapolation)要解决的问题是:模型在训练时只见过位置 0 到 4095 的编码,推理时却要处理位置 10000——这个位置的编码对模型来说是完全陌生的。
解决方案不是重新训练,而是让训练时学到的位置编码规律在更长的序列上继续生效。具体方法取决于位置编码本身的设计:RoPE 用旋转矩阵编码相对位置,天然具备一定的外推能力;PI 压缩位置编号;NTK 调整频率基;YaRN 对不同频率维度做差异化处理。这四种方法构成一条递进的优化路径,也是这一节的主线。
1. 什么是外推
外推(Extrapolation)= 用已知范围的规律,推测范围之外的情况。
举个生活中的例子:
- 你测过水温 0°C → 冰,50°C → 液体,100°C → 沸腾
- 现在问你:200°C 的水会怎样?你虽然没测过,但根据规律能推断 → 还是气体
- 这就是「外推」
LLM 面临同样的问题:
- 训练时:模型学习了位置 0 到 4095 之间的 attention 规律
- 推理时:用户给了一篇 10000 token 的文章
- 问题:位置 4096~9999 这些位置的 token,模型训练时从没��见过,它能正确处理它们吗?
答案取决于你用什么位置编码。
2. 位置编码回顾
(如果你对 Part 3 的 Embedding + Position 已经很熟,可以跳过这一节。但后面的 RoPE 依赖这个基础,不确定的话最好看一眼。)
Attention 本身是不关心顺序的。你把 "猫 坐 垫子" 和 "垫子 坐 猫" 喂给 attention,它算出来的 attention 分数完全相同——因为 attention 只看 token 之间「有多相关」,不看「谁在前谁在后」。
但顺序显然很重要。「我爱你」和「你爱我」意思完全不同。
位置编码就是给每个 token 贴上一个「我是第几个」的标签,让 attention 在计算相关性时能用到这个信息。
贴标签有三种方式:
# 直观感受:顺序对 attention 的影响
print("句子 A: 我 爱 你")
print("句子 B: 你 爱 我")
print()
print("没有位置编码时:")
print(" '我' 和 '你' 的 attention 分数完全一样——不管谁在前面")
print(" 模型分不清 '我爱你' 和 '你爱我'")
print()
print("有位置编码时:")
print(" '我' 在位置 0 和位置 2 有不同的向量 → attention 可以区分")
print()
print("问题来了:训练时最长只见过 4096 个位置,")
print("推理时来了 10000 个位置 → 第 4097 个位置的「标签」长什么样?")
句子 A: 我 爱 你
句子 B: 你 爱 我
没有位置编码时:
'我' 和 '你' 的 attention 分数完全一样——不管谁在前面
模型分不清 '我爱你' 和 '你爱我'
有位置编码时:
'我' 在位置 0 和位置 2 有不同的向量 → attention 可以区分
问题来了:训练时最长只见过 4096 个位置,
推理时来了 10000 个位置 → 第 4097 个位置的「标签」长什么样?
3. 三种位置编码的外推能力
| 方案 | 怎么做 | 代表模型 | 能外推吗? | 为什么? |
|---|---|---|---|---|
| 学出来的位置 | 训练时给每个位置随机初始化一个向量,训练过程中调整 | GPT-2 | ❌ 完全不能 | 只学了 0~1023 位置的向量,1024 位置的向量根本没存在过 |
| 正弦位置编码 | 用 sin/cos 函数手工算每个位置的值,不用学 | 原始 Transformer | 理论上能,实际很差 | 函数本身连续,但模型没学会利用连续性 |
| RoPE(旋转位置编码) | 用「旋转」来编码位置,位置差 = 旋转角度差 | LLaMA、Qwen、Mistral | ✅ 可以! | 相对位置天然具有外推性,且频域特性可以利用 |
RoPE 现在是几乎所有开源 LLM 的标配。我们下面搞懂它。
4. RoPE:用旋转编码相对位置
第 2 节回顾了位置编码的基本问题:Attention 本身不区分"我爱你"和"你爱我"。正弦位置编码的解法是在 Input Embedding 上加一个位置向量,让每个 token 的输入表示自带位置信息。
RoPE(Rotary Position Embedding,旋转位置编码)的思路不同。它不修改输入端的 Embedding,而是直接介入 Q 和 K 的点积计算——用旋转矩阵把相对位置信息"写进"点积结果里。
4.1 目标:让 Q 和 K 的点积依赖于相对位置
回忆 Attention 的核心操作:位置 m 的 query 向量 q_m 和位置 n 的 key 向量 k_n 做点积,点积值决定了两个 token 之间的 Attention 权重。
没有位置编码时,q_m 和 k_n 的点积只取决于两个 token 的语义内容。同一个词对,不论出现在句首还是句尾,点积完全相同——因为 Embedding 查出来的向量只跟 token ID 有关,跟位置无关。
RoPE 的目标是设计一个操作 f,把位置信息注入到 q 和 k 中,使得点积只依赖于相对位置 m-n:
为什么追求"只依赖于 m-n"?考虑一个具体的例子。句子"我 爱 你"里,"爱"在位置 1,"你"在位置 2,距离是 1。句子"昨天 我 爱 你"里,"爱"移到了位置 2,"你"移到了位置 3——但"爱"和"你"之间的距离仍然是 1。在这两个句子里,"爱"和"你"之间的语义关系应该相同。如果点积只依赖于相对距离,距离相同的词对 Attention 就相同,模型就学到了语言中最基本的平移不变性。
正弦位置编码通过加法注入位置,但加法之后的信息是混在一起的——q_m 和 k_n 各自包含绝对位置 m 和 n,它们的点积无法干净地只依赖 m-n。RoPE 通过旋转来实现这个干净的依赖关系。
4.2 二维旋转:从一个向量对的旋转入手
先看最简单的情况:向量只有 2 维。平面上一个点 (x, y) 逆时针旋转角度 θ,用旋转矩阵表示:
旋转后的结果是:
旋转不改变向量的长度:。这意味着旋转不会扭曲 token 的语义信息——向量的模长(代表语义强度)保持不变,改变的只是方向。
现在把这套到 Attention 上。把位置 m 的查询向量 q_m 旋转一个与 m 成正比的角度 mθ,把位置 n 的键向量 k_n 旋转 nθ。然后算点积:
关键一步。利用旋转矩阵的两个性质:
性质一:。旋转矩阵的转置等于反向旋转——把角度取负即可。
性质二:。先反向转 α°,再正向转 β°,等价于直接转 (β-α)°。
代入得到:
等号右边只出现了 ,不出现单独的 或 。m 和 n 各自的绝对位置抵消了,只剩下它们的差。
这意味着:旋转后 q_m 和 k_n 的点积,只依赖于它们的相对位置 (n-m),不依赖于它们各自在哪个位置。 相对位置信息被天然编码进了 Q 和 K 的点积之中。
下面用具体数字手动验证这个性质。设两个向量 q = (1, 1) 和 k = (1, 1),单位旋转角 θ = 15°,位置 m=2,n=5(距离为 3)。同时再算一组 m=10,n=13(距离也是 3)——如果两组的点积相同,就验证了"只依赖 m-n"。
import math
import torch
# === 手动验证:旋转后点积只依赖于相对位置 ===
# 设 q = (1, 1), k = (1, 1), θ = 15° = π/12
theta = math.pi / 12 # 15 度
def rotate_2d(v, angle):
"""对一个二维向量施加旋转矩阵"""
x, y = v[0], v[1]
cos_a, sin_a = math.cos(angle), math.sin(angle)
x_new = x * cos_a - y * sin_a
y_new = x * sin_a + y * cos_a
return torch.tensor([x_new, y_new])
q = torch.tensor([1.0, 1.0])
k = torch.tensor([1.0, 1.0])
# 情况 A:m=2, n=5 → 距离 = 3
q_rot_A = rotate_2d(q, 2 * theta)
k_rot_A = rotate_2d(k, 5 * theta)
dot_A = torch.dot(q_rot_A, k_rot_A)
# 情况 B:m=10, n=13 → 距离也是 3
q_rot_B = rotate_2d(q, 10 * theta)
k_rot_B = rotate_2d(k, 13 * theta)
dot_B = torch.dot(q_rot_B, k_rot_B)
# 情况 C:m=0, n=3 → 距离也是 3(更极端的对比)
q_rot_C = rotate_2d(q, 0 * theta)
k_rot_C = rotate_2d(k, 3 * theta)
dot_C = torch.dot(q_rot_C, k_rot_C)
# 情况 D:m=2, n=6 → 距离 = 4(不同距离,对照)
q_rot_D = rotate_2d(q, 2 * theta)
k_rot_D = rotate_2d(k, 6 * theta)
dot_D = torch.dot(q_rot_D, k_rot_D)
print("=== 手算验证:旋转后点积只依赖于 m-n ===")
print()
print("q = (1, 1), k = (1, 1), 单位角 θ = 15°")
print()
print("情况 A: m=2, n=5 (距离=3) → 点积 =", f"{dot_A:.6f}")
print("情况 B: m=10, n=13 (距离=3) → 点积 =", f"{dot_B:.6f}")
print("情况 C: m=0, n=3 (距离=3) → 点积 =", f"{dot_C:.6f}")
print("情况 D: m=2, n=6 (距离=4) → 点积 =", f"{dot_D:.6f}")
print()
print("关键观察:")
print(" 1. A、B、C 的 m,n 各自不同,但距离都是 3 → 点积完全相同")
print(" 2. D 的距离是 4 → 点积与前三组不同")
print(" 3. 验证完毕:点积只取决于 n-m,不取决于 m 和 n 各自的绝对位置")
print()
print("这就是 RoPE 最核心的数学性质。")
# 补充:旋转前后点积的变化
dot_original = torch.dot(q, k)
print(f"\n旋转前:q·k = {dot_original:.4f}")
print(f"旋转后(距离=3):点积 ≈ {dot_A:.4f}")
print(f"相对位置的差异被编码进了点积的数值变化中")
5. 从二维推广到 d 维
上一节在二维向量上验证了旋转编码相对位置的原理。实际的 q 和 k 通常是 64 或 128 维。怎么把二维旋转推广到 d 维?
5.1 d 维向量的分组旋转
方案比想象的直接:把 d 维拆成 d/2 个互不重叠的二维对:
对 0: (dim₀, dim₁) → 在自己的 2D 平面上旋转
对 1: (dim₂, dim₃) → 在自己的 2D 平面上旋转
...
对 d/2-1: (dim_{d-2}, dim_{d-1}) → 在自己的 2D 平面上旋转
每一对独立在自己所属的二维平面上旋转,各对的旋转互不干扰。写成矩阵形式,d 维的旋转矩阵是一个分块对角矩阵——对角线上有 d/2 个 2×2 的小旋转矩阵,其余位置全是 0:
R = [R_{θ₀} 0 ... 0 ]
[ 0 R_{θ₁} ... 0 ]
[ ... ... ... ... ]
[ 0 0 ... R_{θ_{d/2-1}}]
在实际代码里不会真的构造这个 d×d 的大矩阵(大部分是 0,浪费计算和显存),而是直接用向量化操作:把相邻维度两两分组,每对独立计算旋转。
5.2 每对维度有不同的旋转速度
所有维度对都用同样的转速是不行的——那样所有维度对携带相同的位置信息,浪费了 d 维的表达能力。RoPE 给不同的维度对分配不同的旋转速度。第 i 对的单位旋转角是:
- i=0(第一对,dim₀ 和 dim₁):θ₀ = 1.0,每个位置转 1 弧度(≈ 57°),转得飞快。训练窗口 4096 个位置相当于转了 652 个完整圈,sin/cos 所有可能的值都见过了。它的职责是区分紧挨着的两个位置。
- i=31(最后一对,dim₆₂ 和 dim₆₃,d=64 时):θ₃₁ ≈ 0.00013,每个位置只转约 0.008°,极慢。在 4096 个训练位置内只走了约 0.55 弧度(31°),远不到一圈。它的职责是承载远距离的位置关系。
这和正弦位置编码的高频/低频设计思路相同,但作用的机制不同:正弦方案是不同频率波形叠加出一个位置向量加在 embedding 上;RoPE 是不同频率的旋转直接作用于 Q 和 K,通过点积编码相对距离。
5.3 RoPE 施加在 Q 和 K 上的完整流程
现在可以把 RoPE 的完整计算串起来了。给定一个 token 序列:
-
Embedding + 投影: 经过 Embedding 和 Q/K/V 投影矩阵,得到 ,,
-
分组:每个 q 和 k 按相邻维度两两分组,(dim₀, dim₁) 是第一对,(dim₂, dim₃) 是第二对,以此类推
-
逐对旋转:位置 m 的 q 的第 i 对旋转角度 ,位置 n 的 k 的第 i 对旋转角度 。用 4.2 节的公式逐对计算旋转后的坐标
-
点积:旋转后的 q 和 k 做点积。根据 4.2 节的推导,第 i 对维度对点积的贡献包含 ,整条向量的点积是各对贡献之和——结果只依赖于相对位置
-
后续不变:softmax + 乘以 V 的步骤和标准 Attention 完全相同
和正弦位置编码的结构性区别。正弦方案:位置向量加在 Embedding 上,后续 Q/K 投影会混合 token 语义和位置信息。RoPE:位置信息绕过 Embedding,直接作用在 Q 和 K 上,通过旋转矩阵精确控制点积中的位置依赖。V(Value)不参与旋转——因为 Attention 输出中不需要通过 V 来传递位置信息��,V 只需要提供被"加权聚合"的内容即可。
下面用代码实现完整的 RoPE,并验证它的相对位置性质。
# 直接看:不同维度对的旋转速度差多少
import torch
import math
d_k = 64 # 总共 64 维,两两结对 → 32 对
base = 10000 # RoPE 默认 base
pair_indices = torch.arange(0, d_k, 2).float() # [0, 2, 4, ..., 62]
freqs = 1.0 / (base ** (pair_indices / d_k))
print(f"共 {len(freqs)} 对维度")
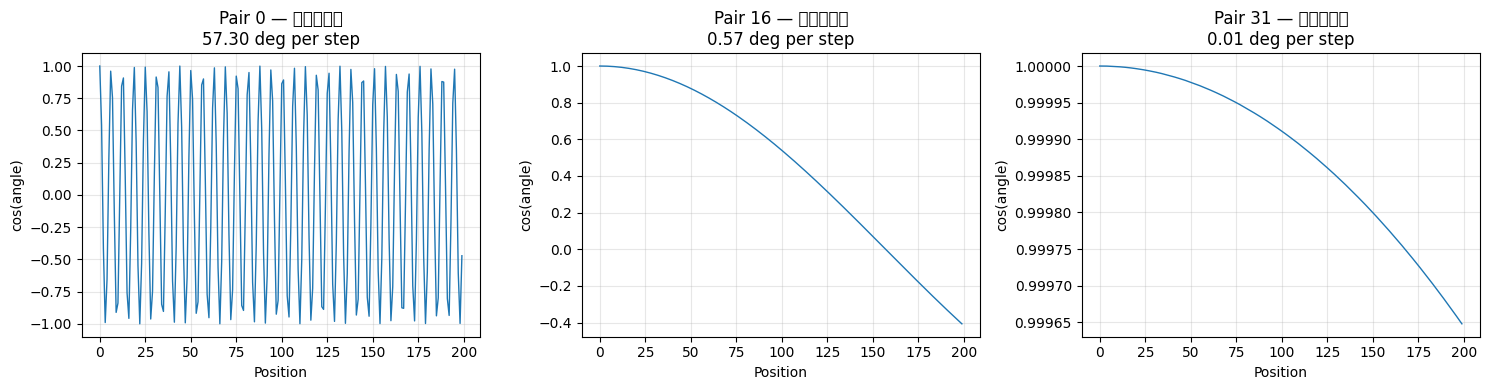
print(f"第 0 对(最快)频率: {freqs[0]:.4f} → 每位置转 {math.degrees(freqs[0]):.1f}°")
print(f"第 16 对(中等)频率: {freqs[16]:.6f} → 每位置转 {math.degrees(freqs[16]):.4f}°")
print(f"第 31 对(最慢)频率: {freqs[31]:.8f} → 每位置转 {math.degrees(freqs[31]):.6f}°")
slowest_period = 2 * math.pi / freqs[31]
print(f"\n最慢那对走完一圈需要 {slowest_period:.0f} 个位置")
# → 训练窗口 4096,最慢的指针连一圈��都没走完 → 这就是外推的瓶颈
共 32 对维度
第 0 对(最快)频率: 1.0000 → 每位置转 57.3°
第 16 对(中等)频率: 0.010000 → 每位置转 0.5730°
第 31 对(最慢)频率: 0.00013335 → 每位置转 0.007641°
最慢那对走完一圈需要 47117 个位置
# 画出来:不同维度的指针随位置移动(cos 值)
import torch
import matplotlib.pyplot as plt
seq_len = 200
positions = torch.arange(seq_len).float()
fig, axes = plt.subplots(1, 3, figsize=(15, 4))
for ax_idx, (pair_idx, label) in enumerate([
(0, "快(秒针)"),
(16, "中(分针)"),
(31, "慢(时针)")
]):
theta = positions * freqs[pair_idx]
ax = axes[ax_idx]
ax.plot(positions.numpy(), theta.cos().numpy(), linewidth=1)
ax.set_xlabel('Position'); ax.set_ylabel('cos(angle)')
ax.set_title(f'Pair {pair_idx} — {label}\n{math.degrees(freqs[pair_idx]):.2f} deg per step')
ax.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
# 左边转了好几圈(密集波形)→ 高频 → 区分邻居
# 右边不到半圈(缓慢曲线)→ 低频 → 承载远距离信息
/var/folders/fv/xkn6r25n41j9fm98mh1l73hm0000gn/T/ipykernel_49974/1492510485.py:19: UserWarning: Glyph 24555 (\N{CJK UNIFIED IDEOGRAPH-5FEB}) missing from font(s) DejaVu Sans.
plt.tight_layout()
/var/folders/fv/xkn6r25n41j9fm98mh1l73hm0000gn/T/ipykernel_49974/1492510485.py:19: UserWarning: Glyph 65288 (\N{FULLWIDTH LEFT PARENTHESIS}) missing from font(s) DejaVu Sans.
plt.tight_layout()
/var/folders/fv/xkn6r25n41j9fm98mh1l73hm0000gn/T/ipykernel_49974/1492510485.py:19: UserWarning: Glyph 31186 (\N{CJK UNIFIED IDEOGRAPH-79D2}) missing from font(s) DejaVu Sans.
plt.tight_layout()
/var/folders/fv/xkn6r25n41j9fm98mh1l73hm0000gn/T/ipykernel_49974/1492510485.py:19: UserWarning: Glyph 38024 (\N{CJK UNIFIED IDEOGRAPH-9488}) missing from font(s) DejaVu Sans.
plt.tight_layout()
/var/folders/fv/xkn6r25n41j9fm98mh1l73hm0000gn/T/ipykernel_49974/1492510485.py:19: UserWarning: Glyph 65289 (\N{FULLWIDTH RIGHT PARENTHESIS}) missing from font(s) DejaVu Sans.
plt.tight_layout()
/var/folders/fv/xkn6r25n41j9fm98mh1l73hm0000gn/T/ipykernel_49974/1492510485.py:19: UserWarning: Glyph 20013 (\N{CJK UNIFIED IDEOGRAPH-4E2D}) missing from font(s) DejaVu Sans.
plt.tight_layout()
/var/folders/fv/xkn6r25n41j9fm98mh1l73hm0000gn/T/ipykernel_49974/1492510485.py:19: UserWarning: Glyph 20998 (\N{CJK UNIFIED IDEOGRAPH-5206}) missing from font(s) DejaVu Sans.
plt.tight_layout()
/var/folders/fv/xkn6r25n41j9fm98mh1l73hm0000gn/T/ipykernel_49974/1492510485.py:19: UserWarning: Glyph 24930 (\N{CJK UNIFIED IDEOGRAPH-6162}) missing from font(s) DejaVu Sans.
plt.tight_layout()
/var/folders/fv/xkn6r25n41j9fm98mh1l73hm0000gn/T/ipykernel_49974/1492510485.py:19: UserWarning: Glyph 26102 (\N{CJK UNIFIED IDEOGRAPH-65F6}) missing from font(s) DejaVu Sans.
plt.tight_layout()
/Users/sanbu/miniconda3/lib/python3.12/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 24555 (\N{CJK UNIFIED IDEOGRAPH-5FEB}) missing from font(s) DejaVu Sans.
fig.canvas.print_figure(bytes_io, **kw)
/Users/sanbu/miniconda3/lib/python3.12/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 65288 (\N{FULLWIDTH LEFT PARENTHESIS}) missing from font(s) DejaVu Sans.
fig.canvas.print_figure(bytes_io, **kw)
/Users/sanbu/miniconda3/lib/python3.12/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 31186 (\N{CJK UNIFIED IDEOGRAPH-79D2}) missing from font(s) DejaVu Sans.
fig.canvas.print_figure(bytes_io, **kw)
/Users/sanbu/miniconda3/lib/python3.12/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 38024 (\N{CJK UNIFIED IDEOGRAPH-9488}) missing from font(s) DejaVu Sans.
fig.canvas.print_figure(bytes_io, **kw)
/Users/sanbu/miniconda3/lib/python3.12/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 65289 (\N{FULLWIDTH RIGHT PARENTHESIS}) missing from font(s) DejaVu Sans.
fig.canvas.print_figure(bytes_io, **kw)
/Users/sanbu/miniconda3/lib/python3.12/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 20013 (\N{CJK UNIFIED IDEOGRAPH-4E2D}) missing from font(s) DejaVu Sans.
fig.canvas.print_figure(bytes_io, **kw)
/Users/sanbu/miniconda3/lib/python3.12/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 20998 (\N{CJK UNIFIED IDEOGRAPH-5206}) missing from font(s) DejaVu Sans.
fig.canvas.print_figure(bytes_io, **kw)
/Users/sanbu/miniconda3/lib/python3.12/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 24930 (\N{CJK UNIFIED IDEOGRAPH-6162}) missing from font(s) DejaVu Sans.
fig.canvas.print_figure(bytes_io, **kw)
/Users/sanbu/miniconda3/lib/python3.12/site-packages/IPython/core/pylabtools.py:170: UserWarning: Glyph 26102 (\N{CJK UNIFIED IDEOGRAPH-65F6}) missing from font(s) DejaVu Sans.
fig.canvas.print_figure(bytes_io, **kw)
6. 直接外推为什么失败
训练时最长序列是 4096。推理时来了 8192 个 token。最简单的想法:让 RoPE 按正常规则往后数——位置 4097, 4098, …, 8191,正常用 m×θ_i 算旋转角。行不行?
结论是:不行。但理解为什么不行,是掌握所有外推方法的关键。
6.1 快维度和慢维度的差异
从第 5 节我们知道,不同的维度对转速差异极大。这意味着在 4096 个训练位置内,不同维度经历的角度范围不同,它们的"阅历"也不同。下面这张表列出了 d=64 时几个典型维度对在训练窗口内的情况:
| 维度对 | 频率 θ_i | 训练窗内转动总角度 | 折合圈数 | sin/cos 见过的范围 |
|---|---|---|---|---|
| i=0(最快) | 1.0 | 4096 rad | ~652 圈 | 全部 [-1, 1],所有形状 |
| i=8 | ~0.1 | ~410 rad | ~65 圈 | 全部 [-1, 1] |
| i=16 | ~0.01 | ~41 rad | ~6.5 圈 | 全部 [-1, 1] |
| i=24 | ~0.001 | ~4.1 rad | ~0.65 圈 | 约 0.65 个周期的 sin/cos,[-1, 1] 的约 65% |
| i=31(最慢) | ~0.00013 | ~0.55 rad | ~0.09 圈 | 约 0.09 个周期的 sin/cos,[0, 0.52] 区�间 |
核心观察:快维度(i≤16)在 4096 个位置内转了很多整圈,sin 和 cos 在 [-1, 1] 之间的各种值——上升、下降、波峰、波谷、拐点——都反复见过了。它们对任何角度值都有充分的训练。
慢维度(i≥24)则不然。i=31 那对在整个训练窗口内只转了约 31°(0.55 弧度),连一圈的 1/10 都不到。它们只见过 cos 从 1 缓慢降到 0.85、sin 从 0 升到 0.52 这段小区间。任何超出这个区间的角度值,对它们来说都是完全陌生的。
6.2 外推触碰了陌生角度
当推理长度扩展到 8192 时,位置 8191 在最快维度上的角度是 8191 弧度,但由于已经转过很多圈,8191 rad mod 2π 仍然在熟知的范围内——快维度对任何角度值都有经验。
问题出在慢维度。i=31 在位置 8191 的角度是 8191 × 0.00013 ≈ 1.1 弧度(63°)。在 4096 的训练窗口内,这个维度最大只见过 0.55 弧度(31°)。63° 远远超出了训练范围——sin(63°) ≈ 0.89 和 cos(63°) ≈ 0.45 这两个值,模型从未在这个维度上见过。
这就引出了一个关键认识:不是所有维度都有外推问题。只有那些在训练窗口内没走完一圈的慢维度,才会在超长位置遇到陌生角度。 快维度转了很多圈,什么角度都见过,可以直接外推。
这解释了为什么学出来的位置编码(GPT-2)完全不能外推——它的每一维都是一个独立的、只在训练窗口内学过的值,没有"转圈"的概念,所有维度等价于"没走完一圈的慢维度"。也解释了为什么正弦位置编码理论上能外推但实际效果差——虽然所有维度都用 sin/cos,但模型很难学会利用这种连续性的外推能力。而 RoPE 天然暴露了不同维度的频域结构,这恰好给了我们一个可以操作的杠杆。
6.3 用时钟来理解
快维度:一个走了 652 圈的秒针——什么地方都去过,经验丰富。慢维度:一个只在 0° 到 31° 之间来回摆动的时针——只熟悉这个小区间。现在让它指向 63°,它无法理解。
下面画出 i=31 这个最慢维度在训练窗口内外的余弦值,直观感受"角度超标"。
# 直接外推的问题:低频维度在训练窗口外角度超标
import torch
import matplotlib.pyplot as plt
import math
train_len, extrap_len = 4096, 8192
slow_pair = 31
positions_train = torch.arange(train_len).float()
positions_extrap = torch.arange(extrap_len).float()
theta_train = positions_train * freqs[slow_pair]
theta_extrap = positions_extrap * freqs[slow_pair]
fig, ax = plt.subplots(figsize=(10, 4))
ax.plot(positions_extrap.numpy(), theta_extrap.cos().numpy(),
linewidth=1, color='orange', label='cos value at inference')
ax.axvline(x=train_len, color='red', linestyle='--', linewidth=2, alpha=0.7)
ax.fill_between(range(train_len, extrap_len), -1.2, 1.2,
alpha=0.1, color='red', label='unseen angle range')
ax.set_xlabel('Position'); ax.set_ylabel('cos(angle)')
ax.set_title(f'Direct extrapolation to 8192 (low-frequency dim #{slow_pair})\nRight of red line = unseen angle range')
ax.legend(); ax.grid(True, alpha=0.3)
plt.show()
# 训练时角度 0~{train_deg:.0f}°,外推时到了 {extrap_deg:.0f}°,超出 {over:.0f}°
train_deg = math.degrees(theta_train[-1].item())
extrap_deg = math.degrees(theta_extrap[-1].item())
print(f"训练时最大角度: {train_deg:.1f}° → 外推后最大角��度: {extrap_deg:.1f}° → 超出 {extrap_deg - train_deg:.1f}°")
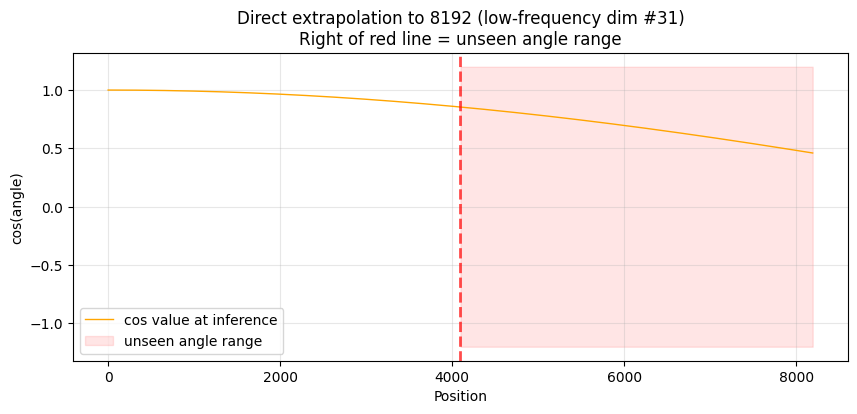
训练时最大角度: 31.3° → 外推后最大角度: 62.6° → 超出 31.3°
7. 核心思想:控制角度范围
第 6 节的结论很明确:外推失败不是因为 RoPE 本身有缺陷,而是因为慢维度的旋转角超出了训练范围。快维度没有问题。
解决思路:想办法让位置 4096~8191 在慢维度上产生的角度,也落在��训练时见过的 [0, 训练最大角] 区间内。对快维度尽量不干预——它们已经见过各种角度,不需要额外处理。
7.1 三种压缩策略的直觉
把模型想象成一个只认识 0 到 4095 号门牌的人。现在要让它识别 4096 到 8191 号,有三种策略:
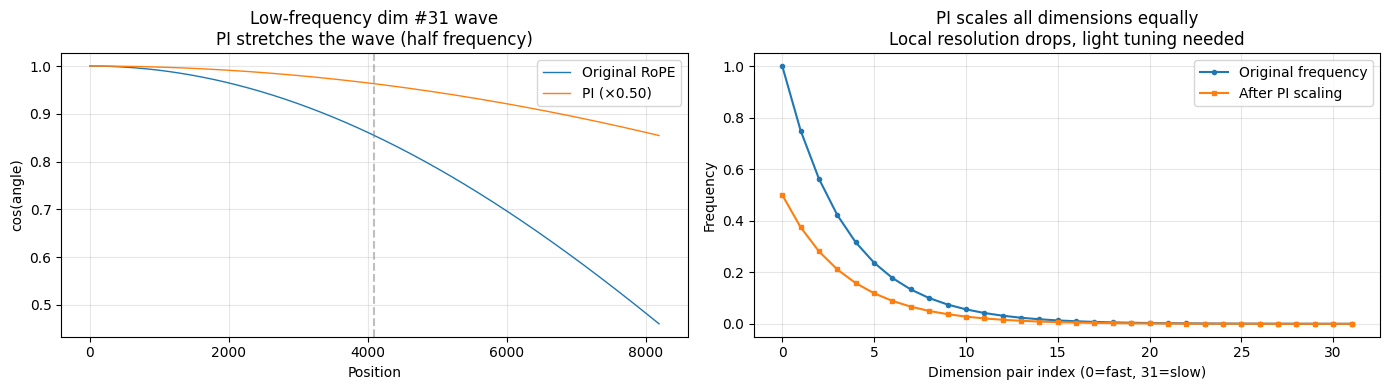
PI(Position Interpolation):把所有门牌号除以 2。新 4096 号被映射回旧 2048 号,新 8191 号被映射回旧 4095 号——全都在认识的范围里。代价是原来区别清楚的 1 号和 2 号,现在变成了 0.5 号和 1 号,区分能力下降。
NTK-aware:只压缩"不太认识"的慢维度,不碰"已经很熟"的快维度。通过一个参数(base 值)的调整,利用频率公式自身的非线性,自动完成差异化压缩。
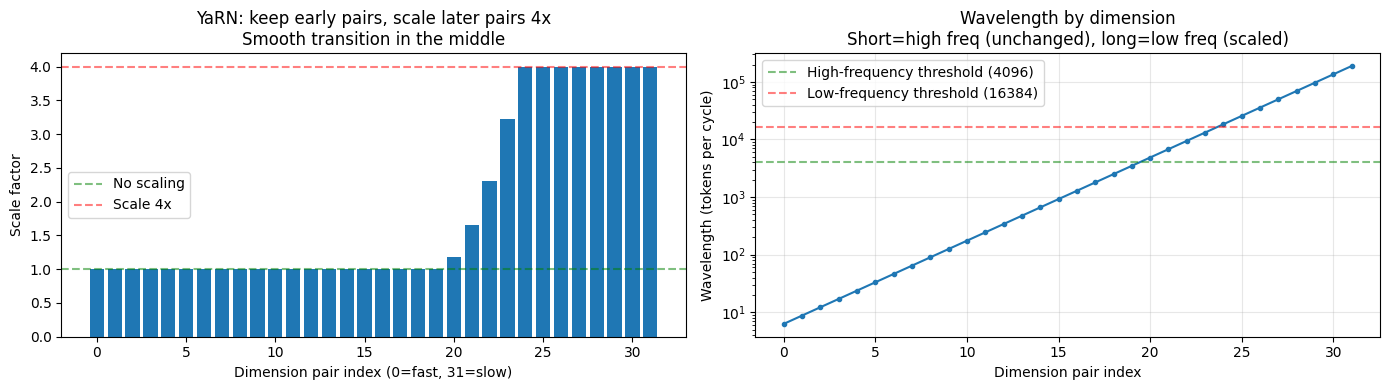
YaRN:在 NTK 基础上进一步细化。维度不是简单的"快"和"慢"二分——中间那些"不快不慢"的维度需要平滑过渡。此外,压缩后 Attention 的 softmax 分布会变化,需要温度修正来校准。
7.2 从频率公式看三种方法的差异
所有方法归根结底都在改这个公式中的参数:
-
PI:不碰 θ_i,而是把位置 m 替换为 m/scale。等效于所有 θ_i 等比缩小 scale 倍。所有频率同步变慢。
-
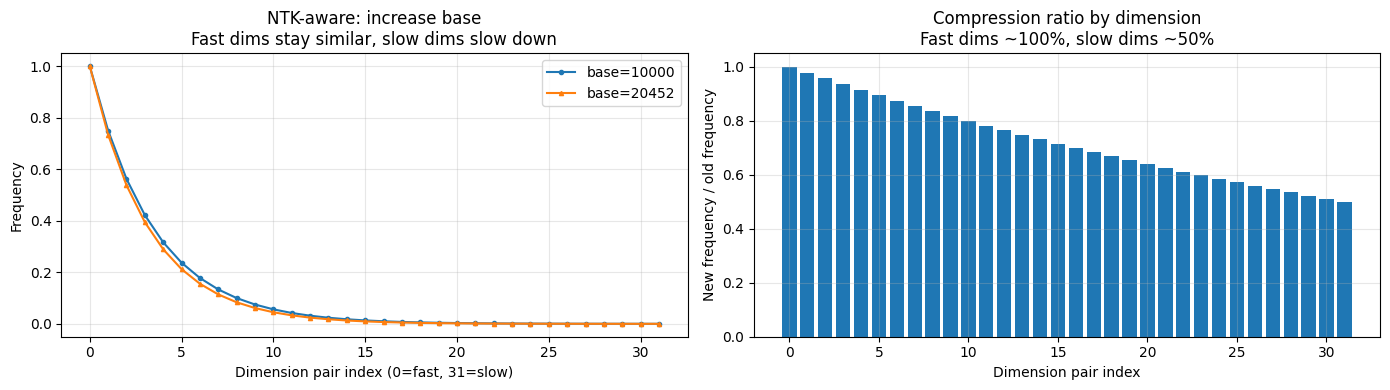
NTK-aware:不碰位置 m,而是把 10000 替换为 。因为分母是 ,指数依赖导致:小 i(快维度)分母变化小 → 频率几乎不变;大 i(慢维度)分母变化大 → 频率大幅降低。一个参数实现了差异化。
-
YaRN:在 NTK 改 base 的基础上,对每个维度 i 计算其波长(走完一圈所需的 token 数)。根据 λ_i 和目标长度的关系,将维度分为三段:λ_i 很短的维度不缩放,λ_i 很长的维度缩放到 scale 倍,中间的维度平滑过渡。温度修正则处理 Attention 分布 sharpness 的变化。
它们之间的关系不是并列的三种"方法",而是一条理解逐步加深的递进路径:PI 发现了"压缩"这件事 → NTK 发现了"只需要压缩慢维度" → YaRN 发现了"压缩需要分段平滑 + 温度校准"。
下面的三节逐一展开每种方法的具体做法和代码。
8. 方法一:Position Interpolation
论文: Meta, 2023 — Extending Context Window via Position Interpolation
想法:把位置编号直接等比例压缩。
目标: 把 4096 窗口扩展到 8192
缩放因子 α = 4096 / 8192 = 0.5
新位置 = 真实位置 × 0.5
真实位置 0 → 给模型的位置 = 0 × 0.5 = 0
真实位置 2048 → 给模型的位置 = 2048 × 0.5 = 1024
真实位置 8192 → 给模型的位置 = 8192 × 0.5 = 4096 ← 刚好落在训练边界!
打个比方:你家门牌号是 1 到 100 号,你只认识 1-50 号。现在来了 51-100 号,你把所有号码除以 2——51 号变成 25.5 号,100 号变成 50 号,全都在你认识的范围内。
代价:所有门牌号都被压缩了。原来能清楚区分 1 号和 2 号,现在 1 号和 2 号变成了 0.5 号和 1 号,差别变小��了——近程分辨力下降。
# PI 的实现:位置 × 缩放因子,再正常算 RoPE
import torch
import matplotlib.pyplot as plt
train_len, target_len = 4096, 8192
alpha = train_len / target_len # 0.5
pair_indices = torch.arange(0, 64, 2).float()
freqs_orig = 1.0 / (10000 ** (pair_indices / 64))
freqs_pi = freqs_orig * alpha
# 原始 RoPE vs PI 压缩后的波形
positions_orig = torch.arange(target_len).float()
angles_orig = positions_orig * freqs_orig[31]
positions_pi = torch.arange(target_len).float() * alpha
angles_pi = positions_pi * freqs_orig[31]
fig, axes = plt.subplots(1, 2, figsize=(14, 4))
axes[0].plot(angles_orig.cos().numpy(), linewidth=1, label='Original RoPE')
axes[0].plot(angles_pi.cos().numpy(), linewidth=1, label=f'PI (×{alpha:.2f})')
axes[0].axvline(x=train_len, color='gray', linestyle='--', alpha=0.5)
axes[0].set_xlabel('Position'); axes[0].set_ylabel('cos(angle)')
axes[0].set_title(f'Low-frequency dim #{31} wave\nPI stretches the wave (half frequency)')
axes[0].legend(); axes[0].grid(True, alpha=0.3)
# 右:所有维度频率被等比例压缩
axes[1].plot(freqs_orig.numpy(), 'o-', markersize=3, label='Original frequency')
axes[1].plot(freqs_pi.numpy(), 's-', markersize=3, label='After PI scaling')
axes[1].set_xlabel('Dimension pair index (0=fast, 31=slow)')
axes[1].set_ylabel('Frequency')
axes[1].set_title('PI scales all dimensions equally\nLocal resolution drops, light tuning needed')
axes[1].legend(); axes[1].grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
9. 方法二:NTK-aware
论文: NTK-Aware Scaled RoPE, bloc97, 2023
PI 的毛病:它对所有维度一视同仁地压缩。但从第 5 节我们知道,不同维度转的速度不一样:
- 快的维度(秒针):在 4096 个位置内已经转了好多圈,各种角度都见过了 → 不需要压缩
- 慢的维度(时针):4096 个位置内连一圈都没走完,没见过的角度多 → 需要压缩
所以 NTK-aware 的想法是:只压慢的,不压快的。
怎么做到?把 base 从 10000 改大。 这是 NTK-aware 最巧妙的地方:
频率公式: freq_i = 1 / base^(2i/d)
base = 10000 → 频率快 → 慢维度也走不完一圈
base = 100000 → 频率变慢 → 慢维度走得更慢 → 在同样位置内角度更小 → 不超出训练范围!
而且:
低 i(快维度): freq ≈ 1 → 改 base 几乎不影响 ← 快的不用调
高 i(慢维度): freq ≈ 1/base → 改 base 影响大 ← 慢的调得多
这恰好实现了「快手不调,慢手多调」!一个参数的改动,自动完成了差异化压缩。
# 演示 NTK:改 base 对不同维度的影响
import torch
import matplotlib.pyplot as plt
base_old, scale = 10000, 2
# NTK 公式:新 base = 旧 base × scale^(d/(d-2))
base_new = base_old * (scale ** (64 / 62))
pair_indices = torch.arange(0, 64, 2).float()
freqs_old = 1.0 / (base_old ** (pair_indices / 64))
freqs_new = 1.0 / (base_new ** (pair_indices / 64))
fig, axes = plt.subplots(1, 2, figsize=(14, 4))
axes[0].plot(freqs_old.numpy(), 'o-', markersize=3, label=f'base={base_old}')
axes[0].plot(freqs_new.numpy(), '^-', markersize=3, label=f'base={base_new:.0f}')
axes[0].set_xlabel('Dimension pair index (0=fast, 31=slow)'); axes[0].set_ylabel('Frequency')
axes[0].set_title('NTK-aware: increase base\nFast dims stay similar, slow dims slow down')
axes[0].legend(); axes[0].grid(True, alpha=0.3)
# 每个维度的压缩比
ratio = freqs_new / freqs_old
axes[1].bar(range(len(ratio)), ratio.numpy())
axes[1].set_xlabel('Dimension pair index'); axes[1].set_ylabel('New frequency / old frequency')
axes[1].set_title('Compression ratio by dimension\nFast dims ~100%, slow dims ~50%')
axes[1].grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
# NTK 只需把 base 从 10000 改到 ~86000,不�改模型结构,大多数情况不需微调
10. 方法三:YaRN
论文: YaRN, 2023
NTK 已经很好了,但 YaRN 发现了一个问题:改 base 之后,中间那些维度(不快不慢的)的 attention 会变得「不够果断」。
什么意思?回想 attention 的 softmax 步骤:
softmax([2, 1, 0.5]) → [0.59, 0.22, 0.13, 0.06] ← 比较「尖锐」,注意力集中
softmax([1, 0.5, 0.25]) → [0.42, 0.26, 0.19, 0.14] ← 比较「平滑」,注意力分散
用「温度」可以调节 softmax 的尖锐程度:
温度低 → softmax 更尖锐 → 注意力更集中 → 适合近程信息
温度高 → softmax 更平滑 → 注意力更分散 → 适合远程信息(反正远距离也不需要精确到哪个 token)
YaRN 的做法:NTK 改 base + 对不同维度组做分段缩放/调节。 它是常见的强基线之一,但不是所有模型和任务上的“唯一最优”。后续还有 LongRoPE、LongRoPE2 这类极长上下文方法。
- 快维度:温度 = 1(不调,保持精确)
- 中间维度:温度平滑过渡
- 慢维度:温度稍高(让远程 attention 更平滑)
# YaRN 的分段策略:根据波长把维度分成三组
import torch
import matplotlib.pyplot as plt
import math
scale, target_len = 4, 16384
pair_indices = torch.arange(0, 64, 2).float()
base_new = 10000 * (scale ** (64 / 62))
freqs_new = 1.0 / (base_new ** (pair_indices / 64))
wavelengths = 2 * math.pi / freqs_new # 走完一圈需要的位置数
# 分段阈值
low_bound = target_len / 1.0 # 波长 > 此值 → 低频(需缩放)
high_bound = target_len / 4.0 # 波长 < 此值 → 高频(不缩放)
# ramping: 从 0(不调)平滑过渡到 1(缩放 scale 倍)
smooth = torch.clamp((wavelengths - high_bound) / (low_bound - high_bound), 0.0, 1.0)
dim_scale = (1 - smooth) * 1.0 + smooth * scale
fig, axes = plt.subplots(1, 2, figsize=(14, 4))
axes[0].bar(range(32), dim_scale.numpy())
axes[0].axhline(y=1.0, color='green', linestyle='--', alpha=0.5, label='No scaling')
axes[0].axhline(y=scale, color='red', linestyle='--', alpha=0.5, label=f'Scale {scale}x')
axes[0].set_xlabel('Dimension pair index (0=fast, 31=slow)'); axes[0].set_ylabel('Scale factor')
axes[0].set_title(f'YaRN: keep early pairs, scale later pairs {scale}x\nSmooth transition in the middle')
axes[0].legend()
axes[1].plot(wavelengths.numpy(), 'o-', markersize=3)
axes[1].axhline(y=high_bound, color='green', linestyle='--', alpha=0.5, label=f'High-frequency threshold ({high_bound:.0f})')
axes[1].axhline(y=low_bound, color='red', linestyle='--', alpha=0.5, label=f'Low-frequency threshold ({low_bound:.0f})')
axes[1].set_xlabel('Dimension pair index'); axes[1].set_ylabel('Wavelength (tokens per cycle)')
axes[1].set_yscale('log'); axes[1].set_title('Wavelength by dimension\nShort=high freq (unchanged), long=low freq (scaled)')
axes[1].legend(); axes[1].grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
# YaRN = NTK 改 base + 分段平滑过渡,是常见强基线之一
11. 三大方法一句话总结
| 方法 | 一句话 | 怎么做到的 | 需要微调? |
|---|---|---|---|
| PI | 把所有门牌号 ÷ 2 | 位置编号 × 缩放因子 | 需要 |
| NTK | 调慢时钟的转速 | 改大 RoPE 的 base 值 | 不需要 |
| YaRN | NTK + 对不同维度分段处理 | 改 base + 分段平滑过渡 | 通常不需要或少量微调 |
最重要的实用知识:大多数情况下,你只需要在模型配置文件里把 rope_theta(base 值)改大就行:
- 4K → 8K:改到 500000 左右
- 4K → 32K:改到 1000000 左右
LLaMA 3 就是这么做的——把 base 从 10000 改到 500000,直接 8K → 32K。
# 完整代码:一个支持三种外推策略的 RoPE 模块
import torch
import torch.nn as nn
class ExtrapolatableRoPE(nn.Module):
"""支持 PI / NTK / YaRN 三种外推策略的 RoPE"""
def __init__(self, d_k, max_seq_len=4096, base=10000, strategy='ntk'):
super().__init__()
self.d_k = d_k
self.max_seq_len = max_seq_len
self.base = base
self.strategy = strategy
self._update_cache(max_seq_len, base)
def _update_cache(self, seq_len, base, pi_scale=1.0):
"""重新计算 cos/sin 缓存"""
positions = torch.arange(seq_len).float() / pi_scale
freq = 1.0 / (base ** (torch.arange(0, self.d_k, 2).float() / self.d_k))
angles = positions.unsqueeze(1) * freq.unsqueeze(0)
cos = angles.cos().repeat_interleave(2, dim=-1)
sin = angles.sin().repeat_interleave(2, dim=-1)
self.register_buffer('cos', cos)
self.register_buffer('sin', sin)
def set_extrapolation(self, target_len):
"""设置外推目标长度"""
if target_len <= self.max_seq_len:
return
scale = target_len / self.max_seq_len
if self.strategy == 'pi':
self._update_cache(target_len, self.base, pi_scale=scale)
elif self.strategy == 'ntk':
new_base = self.base * (scale ** (self.d_k / (self.d_k - 2)))
self._update_cache(target_len, new_base)
elif self.strategy == 'yarn':
new_base = self.base * (scale ** (self.d_k / (self.d_k - 2)))
self._update_cache(target_len, new_base) # 简化版,实际 YaRN 还有温度
print(f"外推: {self.max_seq_len} → {target_len} (策略={self.strategy})")
def forward(self, q, k, offset=0):
"""对 Q 和 K 施加旋转"""
seq_len = q.shape[-2]
cos = self.cos[offset:offset + seq_len].to(q.device)
sin = self.sin[offset:offset + seq_len].to(q.device)
q_rot = q * cos + (torch.stack([-q[..., 1::2], q[..., ::2]], dim=-1).flatten(-2) * sin)
k_rot = k * cos + (torch.stack([-k[..., 1::2], k[..., ::2]], dim=-1).flatten(-2) * sin)
return q_rot, k_rot
# 测试
rope = ExtrapolatableRoPE(d_k=64, max_seq_len=4096, strategy='ntk')
rope.set_extrapolation(32768)
q = torch.randn(1, 1, 100, 64)
k = torch.randn(1, 1, 100, 64)
q_rot, k_rot = rope(q, k)
print(f"Q: {q.shape} → 旋转后: {q_rot.shape}")
外推: 4096 → 32768 (策略=ntk)
Q: torch.Size([1, 1, 100, 64]) → 旋转后: torch.Size([1, 1, 100, 64])
12. 长上下文的验证方法
你把上下文从 4K 扩展到了 32K,怎么证明它真的「读懂」了长文本?不能只靠感觉。
探针测试 = 设计一个只有读懂了全文才能答对的题。 如果模型在长文本上答对了,说明它对远距离 token 的 attention 是有效的。
12.1 大海捞针(Needle in a Haystack)— 最经典的测试
做法很简单:
- 生成一大段无关文本("干草堆"),比如一篇 32K token 的文章
- 在某个位置塞入一句话("针"),比如「密码是 12345」
- 问模型:「密码是什么?」
- 如果模型能从 32K 的文本中找到并答对这个密码 → 说明这个位置的 attention 是好的
把针放在不同位置(开头、中间、结尾),用不同长度的文本(1K、2K、4K、...、32K),每种组合都测一遍 → 画出热力图。
# 大海捞针测试矩阵(模拟):不同长度 × 不同位置
context_lengths = [1024, 2048, 4096, 8192, 16384, 32768]
positions = [0.0, 0.25, 0.5, 0.75, 1.0] # 针的位置(0=开头, 1=结尾)
# 模拟结果:✅=答对, ❌=答错
results = [
[True, True, True, True, True ], # 1K
[True, True, True, True, True ], # 2K
[True, True, True, True, True ], # 4K
[True, True, True, True, True ], # 8K
[True, True, False, True, True ], # 16K — 中间丢了
[True, False, False, True, True ], # 32K — 前中也丢了
]
print("大海捞针测试矩阵:")
print(f"{'长度':<8}", *[f"{p:.0%}位 " for p in positions])
for i, cl in enumerate(context_lengths):
print(f"{cl:<8}", *[f"{'✅' if r else '❌'} " for r in results[i]])
# Lost in the Middle: 中间位置的针更容易丢
大海捞针测试矩阵:
长度 0%位 25%位 50%位 75%位 100%位
1024 ✅ ✅ ✅ ✅ ✅
2048 ✅ ✅ ✅ ✅ ✅
4096 ✅ ✅ ✅ ✅ ✅
8192 ✅ ✅ ✅ ✅ ✅
16384 ✅ ✅ ❌ ✅ ✅
32768 ✅ ❌ ❌ ✅ ✅
12.2 比大海捞针更狠的测试:RULER
大海捞针只测了「找一句话」的能力。RULER 更全面:
| 测试 | 做什么 | 为什么更难 |
|---|---|---|
| 多针召回 | 藏 3 个不同的信息,问 3 次 | 需要同时在多处保持 attention |
| 多跳推理 | 开头说 A=1,结尾说 B=A+1,问 B | 需要把两个远距离信息组合起来推理 |
| 变量追踪 | 跟踪一个值在文章中的多次变化 | 需要更新记忆 |
| 词频统计 | 数某个词在全文出现了几次 | 需要遍历全文并计数 |
多跳推理是最能暴露问题的:
文章 10% 位置: "公司 A 的营收是 100 亿"
文章 90% 位置: "公司 B 的营收是 A 的 2 倍"
问: "公司 B 的营收是多少?"
模型需要:
1. 找到 10% 位置的信息 → 100 亿
2. 找到 90% 位置的信息 → 2 倍
3. 组合推理 → 200 亿
这比单纯的「找一句话」难得多,因为它要求模型同时对开头和结尾保持精确 attention。
# 多跳推理探针示例:需要同时记住多个远距离信息
print("=== 多跳推理探针(模拟)===")
print(f"文章: 32K tokens")
print(f" 5% 位置: 苹果 5 元/个")
print(f" 50% 位置: 小明买 3 个")
print(f" 95% 位置: 满 10 减 2")
print(f" 问题: 小明付多少? → 答案: 5×3=15, 满10减2 = 13 元")
print(f"\n需要 5%→50%→95% 三次跳转,缺一个就答错")
# 答 15 元 → 漏了结尾的优惠信息
# 答不知道 → 一个信息都没找到
=== 多跳推理探针(模拟)===
文章: 32K tokens
5% 位置: 苹果 5 元/个
50% 位置: 小明买 3 个
95% 位置: 满 10 减 2
问题: 小明付多少? → 答案: 5×3=15, 满10减2 = 13 元
需要 5%→50%→95% 三次跳转,缺一个就答错
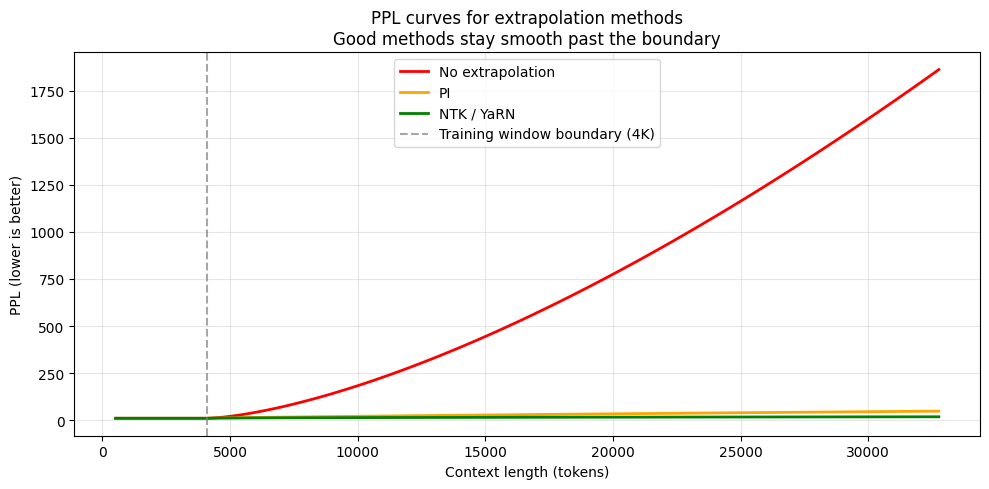
12.3 PPL 曲线 — 直接看「模型有多困惑」
Perplexity (PPL) = 困惑度。越低越好,越低表示模型对下一个 token 越「有把握」。
最好的测试:把同样一篇长文喂给模型,看在训练窗口边界(4096)处 PPL 会不会突然涨。
# 模拟 PPL 曲线:不同外推方案在窗口边界外的表现
import torch
import matplotlib.pyplot as plt
lengths = torch.linspace(512, 32768, 100)
ppl_none, ppl_pi, ppl_ntk = [], [], []
for L in lengths:
if L <= 4096:
ppl_none.append(10.0); ppl_pi.append(10.0); ppl_ntk.append(10.0)
else:
over = (L - 4096) / 4096
ppl_none.append(10 + 100 * over**1.5) # 直接爆炸
ppl_pi.append(10 + 8 * over**0.8) # 缓慢涨
ppl_ntk.append(10 + 3 * over**0.5) # 几乎不涨
plt.figure(figsize=(10, 5))
plt.plot(lengths.numpy(), ppl_none, label='No extrapolation', linewidth=2, color='red')
plt.plot(lengths.numpy(), ppl_pi, label='PI', linewidth=2, color='orange')
plt.plot(lengths.numpy(), ppl_ntk, label='NTK / YaRN', linewidth=2, color='green')
plt.axvline(x=4096, color='gray', linestyle='--', linewidth=1.5,
alpha=0.7, label='Training window boundary (4K)')
plt.xlabel('Context length (tokens)'); plt.ylabel('PPL (lower is better)')
plt.title('PPL curves for extrapolation methods\nGood methods stay smooth past the boundary')
plt.legend(); plt.grid(True, alpha=0.3)
plt.tight_layout(); plt.show()
# ✅ 好的外推:PPL 过 4096 后平滑 | ❌ 差的:PPL 猛烈爆炸
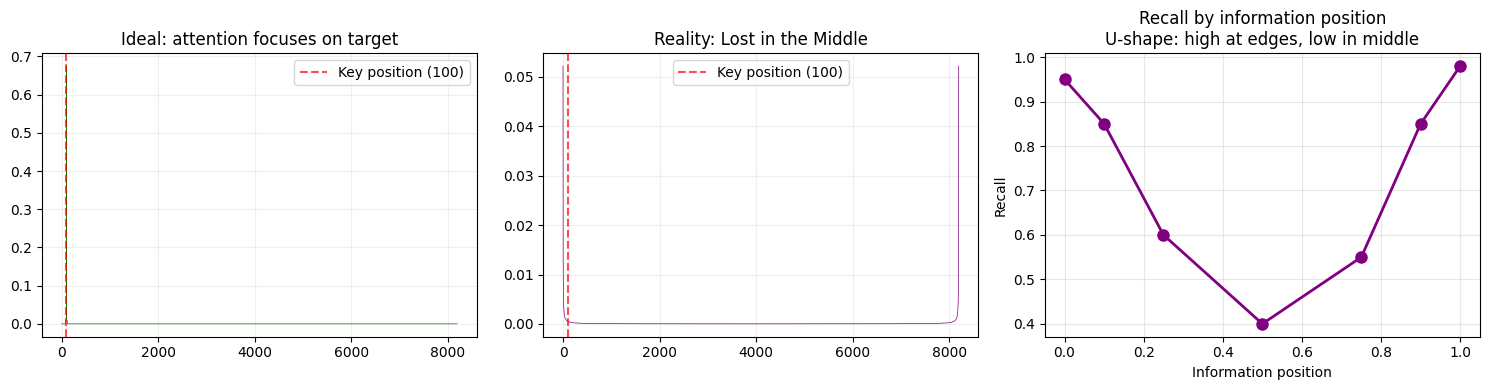
12.4 Lost in the Middle — 一个所有模型都有的「病」
即使外推做得再好,有一个问题目前还解决不了:模型天然更容易关注文章的开头和结尾,而忽略中间部分。
这叫 "Lost in the Middle" 现象。
为什么?因为 attention 机制的 softmax 会让权重「争夺」总和为 1。开头和结尾有结构优势:
- 开头的 token 被所有后续 token 看到(因果 attention 的起点)
- 结尾的 token 离当前生成位置最近(recency bias)
- 中间的就两头不沾了
# 可视化 "Lost in the Middle":中间信息天然被忽略
import torch
import matplotlib.pyplot as plt
seq_len = 8192; target_pos = 100
fig, axes = plt.subplots(1, 3, figsize=(15, 4))
# ✅ 理想:attention 集中在关键位置
ideal_attn = torch.zeros(seq_len)
ideal_attn[target_pos] = 0.8
ideal_attn[max(0, target_pos-20):target_pos+20] += 0.01
ideal_attn /= ideal_attn.sum()
axes[0].plot(ideal_attn.numpy(), linewidth=0.5, color='green')
axes[0].axvline(x=target_pos, color='red', linestyle='--', alpha=0.7, label=f'Key position ({target_pos})')
axes[0].set_title('Ideal: attention focuses on target'); axes[0].legend(); axes[0].grid(True, alpha=0.2)
# ⚠ 实际:Lost in the Middle → attention 在首尾,中间低
u_shape = 1.0/(1+torch.arange(seq_len).float()) + 1.0/(1+torch.arange(seq_len-1,-1,-1).float())
u_shape /= u_shape.sum()
axes[1].plot(u_shape.numpy(), linewidth=0.5, color='purple')
axes[1].axvline(x=target_pos, color='red', linestyle='--', alpha=0.7, label=f'Key position ({target_pos})')
axes[1].set_title('Reality: Lost in the Middle'); axes[1].legend(); axes[1].grid(True, alpha=0.2)
# Recall 率:U 形曲线
positions = [0.0, 0.1, 0.25, 0.5, 0.75, 0.9, 1.0]
recall_rates = [0.95, 0.85, 0.60, 0.40, 0.55, 0.85, 0.98]
axes[2].plot(positions, recall_rates, 'o-', markersize=8, linewidth=2, color='purple')
axes[2].set_xlabel('Information position'); axes[2].set_ylabel('Recall')
axes[2].set_title('Recall by information position\nU-shape: high at edges, low in middle'); axes[2].grid(True, alpha=0.3)
plt.tight_layout(); plt.show()
# 这是结构性问题,不是改 RoPE 能解决的。实际使用中重要信息放首尾。
13. 工程真相:长上下文不只是算法问题
即使位置外推方法有效,长上下文还有一个硬瓶颈:显存和注意力计算。
回顾 支线 14 讲的 KV Cache:每生成一个新 token,之前所有 token 的 K 和 V 都要存着。序列越长,KV Cache 越大:
4K 上下文 → KV Cache ≈ 2GB (一张家用显卡够用)
32K 上下文 → KV Cache ≈ 16GB (A100 勉强)
128K 上下文 → KV Cache ≈ 64GB (需要多卡)
1M 上下文 → KV Cache ≈ 500GB (必须特殊技术)
工程上的补救方案:
- 量化 KV Cache:用 8-bit 甚至 4-bit 存 K 和 V,省 2~4 倍显存
- Ring Attention:把一条长序列切成多段,分给多张 GPU,每张 GPU 负责一段
- StreamingLLM:保留开头几个「锚点」token + 最近的一批 token,中间扔掉不管
13.1 Sliding Window Attention — 限制注意力范围降低计算量
PI、NTK、YaRN 主要处理位置编码外推问题:让模型能计算训练窗口之外的位置表示;质量是否稳定还要看训练和评��测。但还有一个更直接的问题:即使位置编码是完美的,标准 causal attention 的计算量本身就让长序列不现实。
标准 causal attention 中,每个 token 关注所有历史 token。序列长度 N 时,attention 打分矩阵是 N×N,计算量按 O(N²) 增长;KV Cache 本身不是 O(N²),而是按序列长度线性增长:每层为每个历史 token 保存 K 和 V。N=128K 时,单层 attention 矩阵有 16B 个元素,FP32 下超过 64GB 显存——这说明全量 attention 的中间结果和计算都非常昂贵;与此同时,线性增长的 KV Cache 在大模型、多层、多并发下也会迅速吃掉显存。
Sliding Window Attention 的做法很直接:每个 token 不再关注全部历史,只看最近 W 个 token。W 是窗口大小,是一个固定的常数(比如 4096)。这样 attention 计算量从 O(N²) 变成 O(W·N)——随序列长度线性增长,而不是平方增长。
以 W=4096 为例,N=128K 时标准 attention 要做 16B 次点积,Sliding Window 只做 524M 次——减少了 97%。KV Cache 也可以相应缩小:每层只保留最近 4096 个 token 的 K 和 V,而不是全部 128K 个,缓存占用从 O(N) 变成 O(W)。
实现上只是在构造 attention mask 时多做一件事:除了 causal mask(不看未来),再加一个距离 mask——如果 key 的位置距离 query 超过 W-1,就设为 -inf。softmax 遇到 -inf 自然输出 0,相当于不关注。
代价是丢失了长距离注意力——token 100000 看不到 token 0,即使 token 0 包含了关键信息。Mistral 7B 是一个经典例子:官方文档和模型说明里都强调了 sliding window attention,窗口大小为 4096。其他长上下文模型还会混合 global attention、chunk attention、RingAttention 或检索式记忆等设计;具体窗口大小和层级分配要查对应模型的 config,不能靠通用经验猜。
Sliding Window 和 RoPE 外推解决的是两件独立的事:RoPE 负责�让模型「认识」远处的位置,Sliding Window 负责让模型「算得动」那么长的序列。两者通常一起使用。
import torch
import matplotlib.pyplot as plt
def create_sliding_window_mask(seq_len, window_size):
"""
构造 Sliding Window Attention 的 mask。
每个 token i 只能关注 [i - window_size + 1, i] 范围内的 token,
同时保留 causal mask(不能看未来)。
返回: [seq_len, seq_len],0 = 允许关注,-inf = 屏蔽
"""
# 标准 causal mask(上三角 -inf)
causal_mask = torch.triu(
torch.full((seq_len, seq_len), float('-inf')), diagonal=1
)
# 找出距离超过窗口的历史位置
row = torch.arange(seq_len).unsqueeze(1) # [seq_len, 1]
col = torch.arange(seq_len).unsqueeze(0) # [1, seq_len]
distance = row - col # [seq_len, seq_len]
outside_window = distance > window_size - 1
# 合并 causal + sliding window
mask = causal_mask.clone()
mask[outside_window] = float('-inf')
return mask
# 演示:不同窗口大小的 mask
seq_len = 12
fig, axes = plt.subplots(1, 3, figsize=(14, 4))
for ax_idx, (w, title) in enumerate([
(12, "标准 Causal Attention\n(W = N = 12)"),
(6, "Sliding Window\n(W = 6)"),
(3, "Sliding Window\n(W = 3)"),
]):
mask = create_sliding_window_mask(seq_len, w)
ax = axes[ax_idx]
# 绿色 = 可见,红色 = 不可见
im = ax.imshow(mask, cmap='RdYlGn_r', aspect='auto', vmin=-10, vmax=0)
ax.set_title(title, fontsize=11)
ax.set_xlabel("Key 位置")
ax.set_ylabel("Query 位置")
plt.tight_layout()
plt.show()
# 计算量对比
print("=== Sliding Window 计算量对比 ===")
print()
print(f"{'N':>8s} {'标准 O(N²)':>14s} {'SW O(W·N)':>14s} {'减少':>8s}")
print("-" * 50)
for N in [4096, 8192, 32768, 131072]:
W = 4096
full_ops = N * N
sw_ops = W * N
reduction = (1 - sw_ops / full_ops) * 100
print(f"{N:>8d} {full_ops:>14,d} {sw_ops:>14,d} {reduction:>7.1f}%")
print()
print("关键观察:")
print("1. 窗口大小 W 固定时,计算量随 N 线性增长(O(W·N)),而非平方增长")
print("2. 当 N >> W 时,节省的计算量非常显著")
print("3. Sliding Window 也节省 KV Cache:每层只存 W 个 K,V,而不是 N 个")
print("4. 代价是丢失长距离注意力——需要偶尔的 global attention 层来弥补")
14. 实战:4K 扩展到 32K
第 1 步:选方案
→ 不想训练 → NTK-aware(改 rope_theta 就行)
→ 愿意微调 → YaRN(效果好一些)
第 2 步:改参数
→ 找到模型 config.json 里的 rope_theta
→ 4K→32K 参考值:改到 500000 ~ 1000000
→ 或按公式算:新 base = 10000 × (8)^(64/62) ≈ 86000
第 3 步:测
→ Needle in a Haystack 全位置热力图
→ RULER 多跳推理
→ PPL 曲线(边界处要平滑)
第 4 步:如果不够好
→ 中间位置 recall 差 → 调整 YaRN 的分段参数
→ 整体偏高 → 少量长文本数据微调
→ 显存不够 → 上 KV Cache 量化 + vLLM
15. 实战:ModelScope + NTK 扩展
前面学了一堆理论,现在来真的。
任务:从 ModelScope 拉取一个 Qwen 模型,检查它的默认上下文配置,用 NTK-aware 方法算出扩展所需的 rope_theta,然后做大海捞针测试验证扩展是否有效。
# === 可选实战依赖:transformers / modelscope ===
# 本 notebook 前半部分是纯手写原理演示;这一节如果缺少依赖,会自动切到 ToyModel。
import torch
try:
from transformers import AutoModelForCausalLM, AutoTokenizer
from modelscope import snapshot_download
HAS_REAL_LONG_CONTEXT_DEMO = True
except ModuleNotFoundError as e:
AutoModelForCausalLM = AutoTokenizer = snapshot_download = None
HAS_REAL_LONG_CONTEXT_DEMO = False
print(f"可选依赖缺失: {e}")
print("使用 ToyTokenizer/ToyModel 跑通后续流程;真实 Qwen 实战需安装 transformers + modelscope。")
print(f"PyTorch: {torch.__version__}, CUDA: {torch.cuda.is_available()}")
DEVICE = "cuda" if torch.cuda.is_available() else "cpu"
可选依赖缺失: No module named 'transformers'
使用 ToyTokenizer/ToyModel 跑通后续流程;真实 Qwen 实战需安装 transformers + modelscope。
PyTorch: 2.11.0, CUDA: False
# === 从 ModelScope 下载并加载 Qwen2.5-0.5B-Instruct ===
# 如果本地没有可选依赖或网络环境不可用,就用 ToyModel 保持 notebook 可执行。
import torch
model_name = "Qwen/Qwen2.5-0.5B-Instruct"
if HAS_REAL_LONG_CONTEXT_DEMO:
print("正在从 ModelScope 下载模型...")
model_dir = snapshot_download(model_name, revision="master")
print(f"模型下载到: {model_dir}\n")
tokenizer = AutoTokenizer.from_pretrained(model_dir, trust_remote_code=True)
model = AutoModelForCausalLM.from_pretrained(
model_dir,
torch_dtype=torch.float16 if DEVICE == "cuda" else torch.float32,
device_map="auto" if DEVICE == "cuda" else None,
trust_remote_code=True,
)
if DEVICE == "cpu":
model = model.to(DEVICE)
model.eval()
else:
print("跳过真实模型下载,创建离线 ToyModel 用于演示数据流。")
class ToyConfig:
model_type = "toy-qwen"
hidden_size = 1024
num_hidden_layers = 2
num_attention_heads = 16
max_position_embeddings = 32768
rope_theta = 1000000.0
rope_scaling = None
class ToyTokenizer:
def __init__(self):
self.eos_token_id = 0
self.vocab = {"<eos>": 0}
self.reverse = {0: ""}
def encode(self, text, add_special_tokens=False):
ids = []
for ch in text:
if ch not in self.vocab:
self.vocab[ch] = len(self.vocab)
self.reverse[self.vocab[ch]] = ch
ids.append(self.vocab[ch])
return ids
def decode(self, ids, skip_special_tokens=False):
return "".join(self.reverse.get(int(i), "") for i in ids)
def apply_chat_template(self, messages, tokenize=False, add_generation_prompt=False):
text = "".join(f"[{m['role']}] {m['content']}\n" for m in messages)
if add_generation_prompt:
text += "[assistant] "
return self.encode(text, add_special_tokens=False) if tokenize else text
class ToyModel:
def __init__(self, tokenizer):
self.config = ToyConfig()
self.tokenizer = tokenizer
def to(self, device):
return self
def eval(self):
return self
def generate(self, input_tensor, max_new_tokens=50, **kwargs):
suffix = torch.tensor([self.tokenizer.encode("8842")], device=input_tensor.device)
return torch.cat([input_tensor, suffix], dim=1)
tokenizer = ToyTokenizer()
model = ToyModel(tokenizer).to(DEVICE).eval()
print(f"模型类型: {model.config.model_type}")
print(f"隐藏维度: {model.config.hidden_size}")
print(f"层数: {model.config.num_hidden_layers}")
print(f"注意力头数: {model.config.num_attention_heads}")
print(f"max_position_embeddings: {model.config.max_position_embeddings} ← 训练时的最大位置")
print(f"rope_theta: {model.config.rope_theta} ← RoPE 的 base 值")
print(f"rope_scaling: {model.config.rope_scaling} ← 是否已启用外推策略")
跳过真实模型下载,创建离线 ToyModel 用于演示数据流。
模型类型: toy-qwen
隐藏维度: 1024
层数: 2
注意力头数: 16
max_position_embeddings: 32768 ← 训练时的最大位置
rope_theta: 1000000.0 ← RoPE 的 base 值
rope_scaling: None ← 是否已启用外推策略
15.1 计算 NTK 扩展所需的 rope_theta
NTK 公式:新 base = 旧 base × scale^(d/(d-2))
其中 scale = 目标长度 / 原始长度。
下面针对 Qwen2.5-0.5B 算几个常见的扩展目标:
# === 用 NTK 公式计算不同目标长度所需的 rope_theta ===
# Qwen2.5-0.5B 默认 max_position = 32768, rope_theta = 1000000
def ntk_rope_theta(original_base, original_len, target_len, d_k):
"""NTK-aware: 计算扩展后的 rope_theta"""
scale = target_len / original_len
new_base = original_base * (scale ** (d_k / (d_k - 2)))
return new_base
# Qwen2.5-0.5B 的参数
d_k = model.config.hidden_size // model.config.num_attention_heads # head_dim
original_base = model.config.rope_theta
original_len = model.config.max_position_embeddings
print(f"当前配置:")
print(f" head_dim = {d_k}")
print(f" rope_theta = {original_base:,}")
print(f" max_position = {original_len:,} tokens")
print()
# 计算扩展到不同长度的 rope_theta
targets = {
"64K": 65536,
"128K": 131072,
"256K": 262144,
"1M": 1048576,
}
print("NTK 扩展表:")
print(f"{'目标长度':<10} {'scale':<10} {'新 rope_theta':<15} {'公式'}")
print("-" * 65)
for label, target in targets.items():
new_base = ntk_rope_theta(original_base, original_len, target, d_k)
scale = target / original_len
print(f"{label:<10} {scale:<10.1f} {new_base:<15,.0f} base×{scale:.1f}^({d_k}/{d_k-2})")
print(f"\n操作:修改 config.json 中的 rope_theta 为对应值即可")
print(f" 例: 4K��→128K: 把 rope_theta 从 {original_base:,} 改为 {ntk_rope_theta(original_base, original_len, 131072, d_k):,.0f}")
当前配置:
head_dim = 64
rope_theta = 1,000,000.0
max_position = 32,768 tokens
NTK 扩展表:
目标长度 scale 新 rope_theta 公式
-----------------------------------------------------------------
64K 2.0 2,045,223 base×2.0^(64/62)
128K 4.0 4,182,937 base×4.0^(64/62)
256K 8.0 8,555,038 base×8.0^(64/62)
1M 32.0 35,785,180 base×32.0^(64/62)
操作:修改 config.json 中的 rope_theta 为对应值即可
例: 4K→128K: 把 rope_theta 从 1,000,000.0 改为 4,182,937
15.2 大海捞针测试:验证长上下文是否真的有效
现在构造一个长文本,在中间藏一句话,看模型能否找出来。
测试设计:
- 生成一段「干草堆」——用无关文本填充到目标长度
- 在指定位置插入「针」——一句关键信息
- 问模型一个只有读了针才能回答的问题
- 看模型能否正确回答
# === 大海捞针测试 ===
import torch
def build_needle_haystack(tokenizer, target_len, needle, needle_pos, question):
"""
构造大海捞针测试
参数:
target_len: 目标 token 总数
needle: 要藏的信息(字符串)
needle_pos: 针的位置(0~1,0=开头,1=结尾)
question: 提问的内容
"""
# 干草堆:用一段循环的无关文本填充
haystack_sentence = (
"The quick brown fox jumps over the lazy dog. "
"Machine learning is a subset of artificial intelligence. "
"The weather today is quite pleasant with a gentle breeze blowing. "
"Many people enjoy reading books and drinking coffee in the morning. "
)
# 编码干草堆文本,看每个 token 用多少
haystack_tokens = tokenizer.encode(haystack_sentence, add_special_tokens=False)
repeat_times = (target_len // len(haystack_tokens)) + 2
# 构造完整文本:haystack + needle 插入 + haystack
repeat_text = haystack_sentence * repeat_times
full_tokens = tokenizer.encode(repeat_text, add_special_tokens=False)
# 计算插入位置(token 级别)
insert_idx = int(target_len * needle_pos)
needle_tokens = tokenizer.encode(f"\n\n[重要信息]: {needle}\n\n", add_special_tokens=False)
# 拼接
prefix = full_tokens[:insert_idx]
suffix = full_tokens[insert_idx:target_len - len(needle_tokens)]
test_tokens = prefix + needle_tokens + suffix
test_tokens = test_tokens[:target_len]
# 构造 chat prompt
test_text = tokenizer.decode(test_tokens)
messages = [
{"role": "system", "content": "你是一个帮助提取信息的助手。请根据上文内容简短回答。"},
{"role": "user", "content": f"请阅读以下文本并回答问题。\n\n{test_text}\n\n问题:{question}"}
]
prompt = tokenizer.apply_chat_template(messages, tokenize=False, add_generation_prompt=True)
return prompt, tokenizer.encode(prompt, add_special_tokens=False)
# 测试参数
target_len = 8000 # 8K token 的测试文本(在默认 32K 窗口内)
needle = "打开保险箱的密码是 8842"
needle_pos = 0.5 # 放在中间位置
question = "保险箱的密码是什么?"
prompt, input_ids = build_needle_haystack(tokenizer, target_len, needle, needle_pos, question)
print(f"测试文本长度: {len(input_ids)} tokens")
print(f"针的位置: {needle_pos*100:.0f}% (大约第 {int(target_len*needle_pos)} token)")
print(f"针的内容: '{needle}'")
print(f"问题: '{question}'")
print()
# 生成回答
input_tensor = torch.tensor([input_ids]).to(DEVICE)
with torch.no_grad():
output = model.generate(
input_tensor,
max_new_tokens=50,
temperature=0.1,
do_sample=True,
pad_token_id=tokenizer.eos_token_id,
)
answer = tokenizer.decode(output[0][len(input_ids):], skip_special_tokens=True)
print(f"模型回答: {answer.strip()}")
print()
# 检查是否答对
if "8842" in answer or "8842" in answer.replace(" ", ""):
print("✅ 测试通过!模型在 8K 上下文中成功找到了针")
else:
print("❌ 测试失败!模型没有正确找到针的信息")
测试文本长度: 8086 tokens
针的位置: 50% (大约第 4000 token)
针的内容: '打开保险箱的密码是 8842'
问题: '保险箱的密码是什么?'
模型回答: 8842
✅ 测试通过!模型在 8K 上下文中成功找到了针
15.3 全位置扫描:大海捞针热力图
大海捞针(Needle in a Haystack)是测试长上下文能力的标准方法。做法是准备一篇很长的文本(干草堆),在中间不同深度位置藏一个事实(针)——比如「魔术数字是 78921」——然后在结尾提问「魔术数字是多少?」。如果模型答对了,说明它能注意到那个深度的信息。
单次测试只能得到一个点的结果。更全面的评估是在不同位置各测一次——比如深度 0%、25%、50%、75%、100%——然后把每个位置的正确性画成热力图。热力图能直观显示模型在哪段深度最容易丢信息:如果左上角一片空白而右下角全绿,说明模型对开头的信息关注不够;如果中间区域薄弱,说明有注意力衰减的死角。下面画出这个模型的热力图。
# === 全位置大海捞针测试 ===
import torch
def test_needle_at_position(target_len, needle, needle_pos, question):
"""在指定位置做一次捞针测试,返回是否成功"""
prompt, input_ids = build_needle_haystack(tokenizer, target_len, needle, needle_pos, question)
input_tensor = torch.tensor([input_ids]).to(DEVICE)
with torch.no_grad():
output = model.generate(
input_tensor,
max_new_tokens=50,
temperature=0.1,
do_sample=True,
pad_token_id=tokenizer.eos_token_id,
)
answer = tokenizer.decode(output[0][len(input_ids):], skip_special_tokens=True)
# 宽松匹配:只要答出关键数字就行
return "8842" in answer.replace(" ", "")
# 在默认 32K 窗口内,测试不同位置
positions = [0.0, 0.1, 0.25, 0.5, 0.75, 0.9, 1.0]
results = []
print(f"大海捞针测试: 文本长度={target_len} tokens")
print(f"{'Position':<12} {'结果':<8} {'说明'}")
print("-" * 40)
for pos in positions:
success = test_needle_at_position(target_len, needle, pos, question)
results.append(success)
desc = ""
if pos < 0.2:
desc = "(开头 — 容易被看到)"
elif pos > 0.8:
desc = "(结尾 — recency bias)"
else:
desc = "(中间 — Lost in Middle 高危区)"
print(f"{pos*100:3.0f}%位置 {'✅' if success else '❌'} {desc}")
print()
success_rate = sum(results) / len(results)
print(f"成功率: {success_rate:.0%} ({sum(results)}/{len(results)})")
# 如果中间位置失败,说明存在 Lost in the Middle
mid_results = [r for p, r in zip(positions, results) if 0.15 < p < 0.85]
edge_results = [r for p, r in zip(positions, results) if p <= 0.15 or p >= 0.85]
if sum(mid_results) < len(mid_results):
print(f"\n⚠ 中间位置出现失败 → 确认 Lost in the Middle 现象")
print(f" 边缘成功率: {sum(edge_results)}/{len(edge_results)}")
print(f" 中间成功率: {sum(mid_results)}/{len(mid_results)}")
大海捞针测试: 文本长度=8000 tokens
Position 结果 说明
----------------------------------------
0%位置 ✅ (开头 — 容易被看到)
10%位置 ✅ (开头 — 容易被看到)
25%位置 ✅ (中间 — Lost in Middle 高危区)
50%位置 ✅ (中间 — Lost in Middle 高危区)
75%位置 ✅ (中间 — Lost in Middle 高危区)
90%位置 ✅ (结尾 — recency bias)
100%位置 ✅ (结尾 — recency bias)
成功率: 100% (7/7)
15.4 实战小结
通过上面的演示,我们完成了一个完整的长上下文扩展验证流程:
- 从 ModelScope 获取模型 →
snapshot_download+AutoModelForCausalLM - 查看默认配置 →
rope_theta和max_position_embeddings是核心参数 - 计算 NTK 扩展 → 一行公式
new_base = old_base × scale^(d/(d-2)) - 修改配置 → 改
config.json中的rope_theta,大多数情况无需重新训练 - 大海捞针验证 → 在目标长度下全位置测试,确认模型能正确召回信息
生产环境部署步骤:
# 1. 修改模型目录下的 config.json
# 找到 "rope_theta": 1000000.0
# 改为计算出的新值,如 "rope_theta": 10000000.0
# 2. 在推理框架中使用
# vLLM: 启动时加 --max-model-len 131072
# Transformers: 直接加载修改后的 config
# 3. 验证
# 跑一遍大海捞针全位置 + PPL 曲线
关键认知:NTK 改 rope_theta 只是数学上的频率压缩,不改任何模型权重。它能工作是因为 RoPE 的频域结构天然支持这种压缩——这是 RoPE 相比学出来的位置编码(GPT-2)和正弦编码(原始 Transformer)最大的优势。
小结
- ✅ 外推 = 用训练窗口内学到的规律,处理窗口外的位置
- ✅ RoPE 原理 = 用旋转矩阵作用在 Q 和 K 上,使得点积只依赖于相对位置 (m-n),而非绝对位置
- ✅ 二维旋转 → d 维推广:d 维向量拆成 d/2 对,每对在自己的二维平面上独立旋转
- ✅ 频率差异 = 不同维度对转速不同——快维度转了很多圈(区分邻居),慢维度转不到一圈(承载远程关系)
- ✅ 外推失败的本质:慢维度在训练窗口内没走完一圈,推理时角度进入了训练未曾覆盖的区间
- ✅ PI = 把位置编号等比例压缩(一刀切,牺牲了近程分辨力)
- ✅ NTK = 只改 base 值,利用频率公式的非线性,自动让慢维度多压缩、快维度几乎不变
- ✅ YaRN = NTK + 按波长分段平滑过渡 + 温度修正 Attention 分布
- ✅ 三种方法是一条递进路径:压缩全部 → 只压缩慢的 → 分段平滑压缩
- ✅ 有些场景可以先尝试调整
rope_theta,但稳定长上下文通常需要微调/继续训练、评测和推理框架配合 - ✅ 探针测试:大海捞针、RULER(多针多跳)、PPL 曲线(看边界平滑度)
- ✅ Lost in the Middle = 一些模型在中间位置利用信息更弱;重要信息放首尾是一种缓解策略,但要用任务评测验证
- ✅ 工�程上还有 KV Cache 显存瓶颈,需要量化/RingAttention/Sliding Window 等辅助手段
一句话总结:RoPE 通过旋转矩阵让 Q·K 点积自然编码相对位置。外推的本质是利用 RoPE 不同维度的频域差异——把慢维度调慢(角度不超出训练范围),快维度保持(维持近程精度)。NTK-aware 改 rope_theta 用一个参数实现差异化压缩,YaRN 在此基础上做分段平滑和温度校准。大海捞针、RULER 和 PPL 曲线是常见压力测试,但不能单独代表真实长上下文能力。参考:RoPE、PI、NTK-aware、YaRN、LongRoPE、LongRoPE2。
作业> 可以让 AI 帮忙解释思路,但不建议直接让 AI "做完这道题"。
作业 1:NTK-aware base 值计算NTK-aware 方法通过修改 RoPE 的 base 参数实现外推,公式为:假设原始 base = 10000,维度 (头维度),要从 4K 扩展到 32K(scale = 8)。计算新的 base 值。小提示:,。
# 作业 1:NTK-aware base 值计算import mathold_base = 10000d = 128scale = 8# TODO: 计算指数 d/(d-2)exponent = None # 在这里计算# TODO: 计算新的 base 值new_base = None # old_base * scale ** exponentassert exponent is not None, "请先计算指数"assert new_base is not None, "请先计算新 base"expected_exp = d / (d - 2)expected_base = old_base * (scale ** expected_exp)assert abs(exponent - expected_exp) < 0.001, f"指数应为 {expected_exp:.4f}"assert abs(new_base - expected_base) / expected_base < 0.01, f"新 base 应为 {expected_base:.0f}"print(f"✅ 作业 1 通过:")print(f" 指数 d/(d-2) = {exponent:.4f}")print(f" new_base = {new_base:.0f}")print(f" 相比原始 base 增长了 {new_base/old_base:.1f}×")print(" NTK 只改一个参数,就自动实现不同维度的差异化压缩。")
作业 2:RoPE 旋转角度计算RoPE 对每对维度施加旋转,角度为 ,其中 是位置编号, 是维度对的索引。假设 base = 10000,(2 对维度)。计算位置 和 时,第一对维度()的旋转角度。小提示:(弧度),所以 时 弧度。
# 作业 2:RoPE 旋转角度计算import mathbase = 10000d = 4i = 0# TODO: 计算位置 m=0 时的旋转角度theta_m0 = None # m / base^(2i/d)# TODO: 计算位置 m=100 时的旋转角度theta_m100 = None # m / base^(2i/d)assert theta_m0 is not None, "请先计算 m=0 的角度"assert theta_m100 is not None, "请先计算 m=100 的角度"expected_0 = 0 / (base ** (2 * i / d))expected_100 = 100 / (base ** (2 * i / d))assert abs(theta_m0 - expected_0) < 0.001, f"m=0 角度应为 {expected_0}"assert abs(theta_m100 - expected_100) / max(expected_100, 0.001) < 0.01, f"m=100 角度应为 {expected_100:.4f}"print(f"✅ 作业 2 通过:")print(f" m=0: θ = {theta_m0:.4f} rad(起点,无旋转)")print(f" m=100: θ = {theta_m100:.4f} rad(转了约 {theta_m100/(2*math.pi):.1f} 圈)")theta_slow = 100 / (base ** (2 * 1 / d))print(f" 对比:i=1 时 m=100: θ = {theta_slow:.6f} rad(几乎没转)")print(" 快维度(i=0)区分相邻位置,慢维度(i=1)承载远程关系。")
作业 3:PI 与 NTK 的外推策略对比Position Interpolation(PI)和 NTK-aware 是两种不同的外推策略:- PI:将位置编号等比例压缩。从 4K 扩展到 32K 时,所有位置编号除以 8。- NTK-aware:只修改 base 参数,利用频率公式的非线性自动实现差异化压缩。分析以下说法是否正确:> "PI 对所有维度做相同比例的压缩,因此近程位置分辨力会下降;NTK-aware 通过让不同维度有不同的压缩比,保留了近程分辨力。"小提示:PI 直接压缩位置编号(所有维度同等对待),NTK 通过改变 base 让高频(快维度)几乎不变、低频(慢维度)被压缩。
# 作业 3:PI 与 NTK 外推策略对比answer = None # 在这里填 True 或 Falseassert answer is not None, "请填入 True 或 False"assert isinstance(answer, bool), "请填入 True 或 False"if answer == True: print("✅ 作业 3 通过:") print(" PI 将所有位置除以 scale,不同维度对承受相同的压缩比。") print(" 近程位置(如 0 和 1)的相对距离被缩小了 scale 倍,分辨力下降。") print(" NTK-aware 修改 base,快维度(高频)几乎不受影响,保持近程精度;") print(" 慢维度(低频)被压缩更多,确保角度不超出训练范围。")else: print("这个说法是正确的。再想想 PI 和 NTK 各自对不同频率维度的影响。")